
关键词: 国产化PLC,友好型偏航,偏航策略
1.引言
风力发电作为一种可靠的清洁能源越来越受到重视,它利用风力带动风电机组叶片旋转,通过增速机(双馈系列风电机组)将旋转的速度进一步提升,带动发电机旋转将动能转化为电能,并将产生的电能输送到公共电网中。整个机组通过自动控制系统将各个子系统、设备、传感器等连接在一起形成一个自动控制网络,能够完成机组的偏航、变桨及并网发电控制等功能。随着人们对风力发电及风力发电机组的研究不断深入,风电机组自身的设计在不断的优化,除了发电的目的外,对电网和周边环境适应能力高,不扰民等功能型需求都需要不断的加入到机组控制设计中去。
友好型控制系统是指风电机组的控制策略使机组对电网的适应能力更强,不但能够给正常的电网输送电能,还能在电网发生故障(低电压、高电压、电压电流不平衡、电网过频、欠频等)时不脱网,并通过其他控制策略给电网提供有效支撑,帮助电网快速通过故障点,恢复正常状态。另外,友好型控制系统还应包括机组能在控制策略的控制下更好的适应周边环境,比如耐低温、耐高温、噪音小、不扰民等。
由于风能的利用效率并不是很高,因此机组在运行过程中很重要的一个环节就是如何尽可能多的获取更多的风能。机组的偏航系统在机组获得风能的环节中发挥了重要的作用,通过偏航系统的控制,能够保证机组的对风方向,从而保证机组尽可能多的获取风能。
随着国家对于清洁能源的大力发展,风电机组的需求量逐年增加,更多的风电场开始建设在离居住区不远的开阔地带,由于机组叶片不断加长,其旋转带来的变化的阴影容易影响到周边居民的正常生活。在建筑设计中通常要考虑采光问题,但是普通的建筑设计所考虑的对象是地面上的固定物体,而风电机组因为需要不断的调整机舱位置以保证迎风工作,因此住在风电场附近的居民经常会由于被机组叶片的阴影部分扫略到而被阴影及光线交替骚扰。这种机组从一定程度上来说是不友好的,容易给风电场和当地居民造成一定的纠纷隐患。由于偏航噪音过大,因此在夜间及休息时间应尽量减少偏航动作时间。综上所述,需要设计一种实时的、友好的偏航控制策略来提高机组适应环境的能力。
2.友好型偏航控制策略
本文设计的友好型偏航控制策略主要包括3部分内容,低温和常温的选择、是否规避居民区的选择、夜晚和白天的选择。
2.1 低温和常温的不同控制策略
电缆在低温环境下会更加脆弱,易折断,连接塔基及机舱的电缆所能承受的扭转力更小,因此,在低温环境中,机舱朝着一个方向旋转的单向机舱位置角度要低于常温环境中。在实际的偏航系统中,偏航控制器会给机组提供一个硬件的左右极限位置故障反馈,触发该反馈之后,偏航系统被锁定,无法继续偏航,需要人工干预后才能继续偏航。除此之外,偏航控制器还会提供左右极限位置警告,主控程序靠这个警告来进行自动解缆等操作。这些都是通过偏航控制硬件配置的,无法通过程序进行修改。但是在触发硬件保护前,主控程序一般会设置一个软件保护的机舱单向运行角度,这个角度主控程序可以通过温度进行判断,不同的温度对应不同的角度,从而实现了低温和常温不同的控制策略以保证偏航系统的安全。
2.2 规避居民区的控制策略
规避居民区的控制策略是指在普通的偏航对风控制策略的基础上加入了对机组阴影范围的控制,尽可能的减少阴影范围给周边居民造成的影响。如图1所示,风机叶片扫风的平面在出至于太阳光线入射方向的面上的投影为Z,由于叶片的旋转会遮挡阳光,从而在地面上形成D区域的一个由叶片扫过的阴影区域,在区域D中叶片的阴影会不断旋转,根据风速的不同,其旋转速度会有一定的区别。
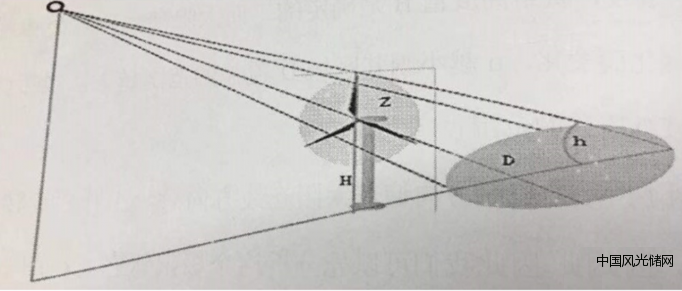
图1 光影区域示意图
通常风电机组的光影影响范围取决于太阳高度角:太阳高于角越大,风机的影子越短,太阳高度角越小,风机的影子越长。图1中所示区域D覆盖的面积,由实时的太阳高度角h,机组高度H及投影面积Z决定。其中,机组高度H是确定的,而太阳高度角h会随着时间和季节的变化而变化,h越小则其区域D覆盖范围越大,投影面积Z越大,区域D覆盖的范围越大。
当机舱方向迎着太阳光线时,由于叶片旋转产生的阴影越浓厚,越宽大,因此我们可以先分析这个极限状态。在图1所示的平面中建立三维坐标系,叶片的位置可以假设某一时刻叶片静止时的位置,太阳高度角可以通过当地经纬度、日期及时间精确的计算出来,利用空间解析几何相关公式计算出太阳光线与叶片交线在地面的投影面积范围。
主控程序计算出阴影区域D的范围之后,将该区域转换为以风机为中心的坐标值,再与居民区的坐标值相比对,判断阴影区域是否与居民区重合,重合度是多少。通过重合度的判断,对机组偏航控制策略进行一定的优化,该策略一旦被启用,机组偏航至该重合区域时会保证机组安全性的前提下继续偏航,直到机舱转过重合区域,此时由于机舱不是正对风向,因此有一定的发电量损失。
2.3 不同时段的偏航控制策略
有阳光的白天,偏航主要以对风及躲避阴影区域位置,阴雨天自动取消躲避策略,正常偏航对风,尽可能多的争取发电量。夜晚,如果机组偏航系统由于自身原因导致噪音过大,可以启动夜晚模式,减少偏航启动次数。
3.策略实施方法
3.1 低温和常温的选择
风电机组可以自动进行低温和常温偏航控制测试选择,执行如下步骤。图片
(1)机组安装有可靠的环境温度测量传感器,最好有冗余;
(2)机组自动控制系统根据当前环境温度进行低温和常温控制策略的自动选择;
(3)人机界面中应具备低温和常温控制策略的手动选择功能。
上述步骤的软件控制流程图如图2所示。
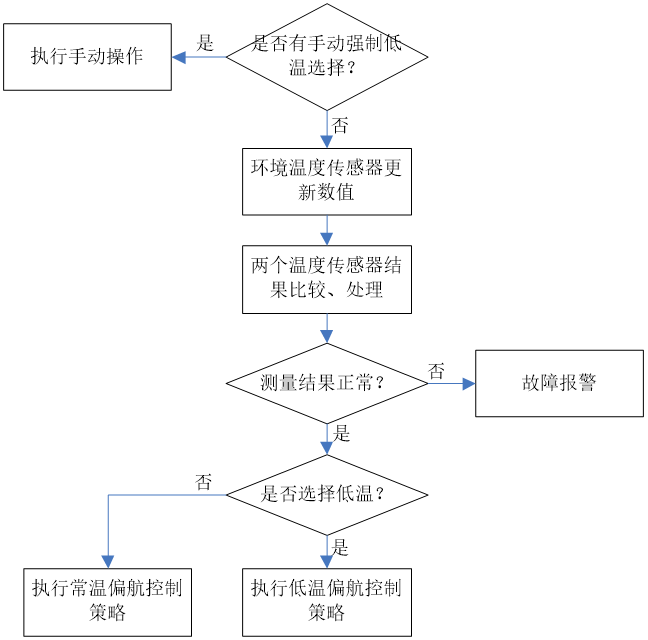
图2 低温和常温偏航控制策略流程图
3.2 规避居民区偏航控制策略的投入
规避居民区偏航控制策略的投入需要进行以下步骤。
(1)机组人机界面上具有手动输入模式,输入数据包括机组的经纬度、海拔高度、空气密度、叶片长度等;
(2)为了保证计算的太阳高度角准确,机组需具备实时的时间校对功能,保证机组时间与当地时间一致;
(3)机组通过加入光敏传感器来自动判断光线强弱,通过系统时间判断季节、太阳高度等值并判断是否投入规避居民区偏航控制策略,如果投入,则将自动进行3中所述的相关计算,然后给出偏航动作指令。当机组通过光敏传感器检测到光线较弱时,如阴雨天、云雾天及夜间时,可以自动退出该控制策略。
(4)机组除具备自动投切该偏航控制策略外,也可以通过手动控制该策略的投入与否。
上述步骤的软件控制流程图如图3所示。
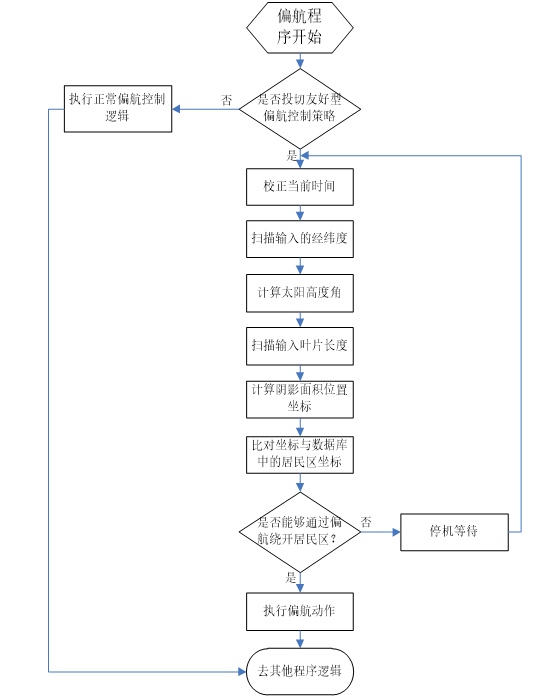
图3 规避光影区域偏航控制策略流程图
4.结论
本次研究应用是在旧机组的PLC升级改造中完成的,这些机组PLC使用年限较长,都是10年前的主流PLC,其CPU性能相对较差,比如ABB公司KT98,KT97系列PLC,CPU主频较低,对于浮点型数据支持不够,不能进行文件操作,对于偏航的数据记录较少,国产化PLC改造后,CPU性能更加优越,文件记录和处理功能更加完善,将偏航系统的数据增加到文件记录中,为偏航系统优化和维护都提供了便利的条件,经过应用取得了良好的效果。
综上分析所述基于国产化PLC的风电机组友好型偏航控制策略可以降低光影影响、有效提高机组环境适应能力。不同时段的多样化控制策略,能够在保证上述控制策略的同时尽可能提高发电量,优化机组性能。
参考文献:
[1]胡姚刚,刘怀盛. 时萍萍等.风电机组偏航系统故障诊断与寿命预测综述[J].中国电机工程学报,2021,DOI:1-11.
[2]苏国梁,李国庆,李凤俊等. 考虑风能随机性趋势的风电机组偏航启动优化研究,可再生能源[J].2021 ,12:1629-1633.
[3]郭金龙.风力发电机组偏航噪声分析及控制措施 [J]机械研究与应用.2021,5:156-158.
[4]耿晓梅,赵桂凤. 关于风力发电场风机光影影响防护距离的研究,气象与环境学报[J].2007 ,23:33-34.
[5]彭郎军,黄凌翔,阳雪兵. 风力发电机组光影影响范围计算方法研究,机械设计[J].2021 ,11:187-189.





